Loading... Please wait...
Loading... Please wait...
 USD
USD





Gadget Factory is currently not shipping any products. This website is being left up for reference purposes. We are working on some new products so check back in six months!


Featured Products










Featured Tutorials

FPGA Clocking: Clocking Wizard in Xilinx ISE
This tutorial shows you how to generate custom clocks inside your FPGA using the simple Clocking Wizard. Easily create clocks at any speeds

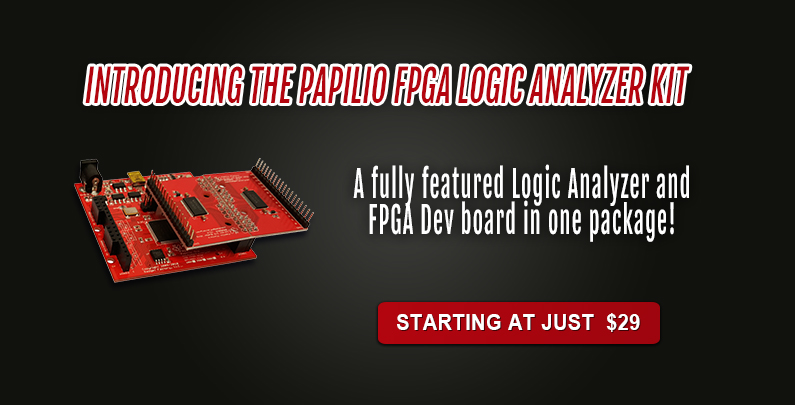
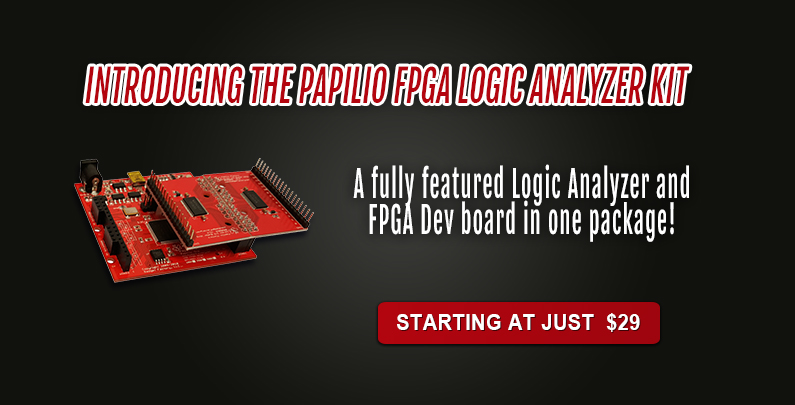
DesignLab – Using Papilio as Stand Alone Logic Analyzer
In this tutorial, we’lle be using the Papilio board as a fully featured Logic Analyzer. You can use it as a standalone Logic Analyzer without making a sketch or making a circuit!

DesignLab – Make a Simple FPGA Circuit!
This is a QuickStart Tutorial showing you how to make a simple FPGA circuit in DesignLab.
 New Products
New Products